
Page 510 - Keubler Motion Sensors
P. 510
Accessories
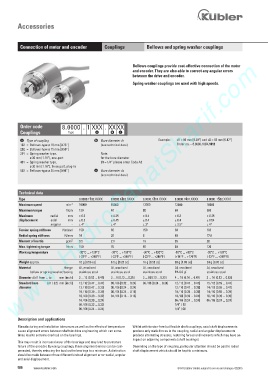
Connection of motor and encoder Couplings Bellows and spring washer couplings
www.HydroSanatSharif.com
Bellows couplings provide cost-effective connection of the motor
and encoder. They are also able to correct any angular errors
between the drive and encoder.
Spring washer couplings are used with high speeds.
Order code 8.0000 . 1 XXX . XX XX
Couplings Type a b c
a Type of coupling b Bore diameter d1 Example: d1 = 10 mm [0.39“] and d2 = 12 mm [0.47“]
102 = Bellows-type ø 19 mm [0.75“] (see technical data) Order no. = 8.0000.1X0X.1012
202 = Bellows-type ø 15 mm [0.59“]
301 = Spring washer type, Note:
ø 30 mm [1.18“], one-part for the bore diameter
401 = Spring washer type, d1 = 1/4” please enter Code A2
ø 30 mm [1.18“], three part, plug-in
502 = Bellows-type ø 25 mm [0.98“] c Bore diameter d2
(see technical data)
Technical data
Type 8.0000.1102.XXXX 8.0000.1202.XXXX 8.0000.1301.XXXX 8.0000.1401.XXXX 8.0000. 1502.XXXX
-1
Maximum speed min 10000 10000 12000 12000 10000
Maximum torque Ncm 120 40 80 60 200
Maximum radial mm ± 0.3 ± 0.25 ± 0.4 ± 0.3 ± 0.35
displacement axial mm ± 0.5 ± 0.45 ± 0.4 ± 0.4 ± 0.54
angular - ± 4° ± 4° ± 3° ± 2.5° ± 4°
Torsion spring stiffness Nm/rad 150 85 150 30 183
Radial spring stiffness N/mm 10 20 6 40 17.8
Moment of inertia gcm 2 9.5 2.1 19 35 20
Max. tightening torque Ncm 150 70 80 80 120
Working temperature -30°C ... +120°C -30°C ... +120°C -30°C ... +120°C -10°C ... +80°C -30°C ... +120°C
[-22°F ... +248°F] [-22°F ... +248°F] [-22°F ... +248°F] [+14°F ... +176°F] [-22°F ... +248°F]
Weight approx. 16 g [0.56 oz] 6.5 g [0.23 oz] 16 g [0.56 oz] 30 g [1.06 oz] 24 g [0.85 oz]
Material flange Al, anodised Al, anodised Al, anodised Al, anodised Al, anodised
bellow or spring washer/casing stainless steel stainless steel stainless steel PA 6.6 gf. stainless steel
Diameter d/d1 from ... to mm [inch] 3 ... 12 [0.12 ... 0.47] 3 ... 9 [0.12 ... 0.35] 3 ... 8 [0.12 ... 0.32] 4 ... 16 [0.16 ... 0.47] 3 ... 16 [0.12 ... 0.63]
Standard bore (d1 / d2) mm [inch] 12 / 12 [0.47 ... 0.47] 08 / 06 [0.32 ... 0.24] 06 / 06 [0.24 ... 0.24] 12 / 12 [0.47 ... 0.47] 15 / 12 [0.59 ... 0.47]
diameter 12 / 10 [0.47 ... 0.39] 06 / 06 [0.24 ... 0.24] 12 / 10 [0.47 ... 0.39] 14 / 12 [0.55 ... 0.47]
10 / 10 [0.39 ... 0.39] 06 / 04 [0.24 ... 0.16] 10 / 10 [0.39 ... 0.39] 14 / 10 [0.55 ... 0.39]
10 / 08 [0.39 ... 0.32] 04 / 04 [0.16 ... 0.16] 10 / 06 [0.39 ... 0.24] 10 / 10 [0.39 ... 0.39]
10 / 06 [0.39 ... 0.24] 06 / 06 [0.24 ... 0.24] 06 / 06 [0.24 ... 0.24]
08 / 08 [0.32 ... 0.32] 1/4” / 10
06 / 06 [0.24 ... 0.24] 1/4” / 06
Description and applications
Manufacturing and installation tolerances as well as the effects of temperature Whilst with torsion-free but flexible shaft couplings, axial shaft displacements
cause alignment errors between shafts in drive engineering which can some- produce only static forces in the coupling, radial and angular displacements
times lead to extreme overload on the bearings. produce alternating stresses, restoring forces and moments which may have an
impact on adjoining components (shaft bearings).
This may result in increased wear of the bearings and may lead to premature
failure of the encoder. By using couplings, these alignment errors can be com- Depending on the type of coupling, particular attention should be paid to radial
pensated, thereby reducing the load on the bearings to a minimum. A distinction shaft displacement which should be kept to a minimum.
should be made between three different kinds of alignment error: radial, angular
and axial displacement.
508 www.kuebler.com © Fritz Kübler GmbH, subject to errors and changes. 02/2015