
Page 231 - Keubler Motion Sensors
P. 231
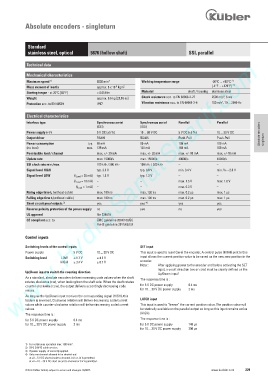
Absolute encoders - singleturn
Standard
stainless steel, optical 5876 (hollow shaft) SSI, parallel
www.HydroSanatSharif.com
Technical data
Mechanical characteristics
1)
Maximum speed 6000 min -1 Working temperature range -20°C ... +80°C 2)
2)
-6
Mass moment of inertia approx. 6 x 10 kgm 2 [-4°F ... +176°F]
Starting torque - at 20°C [68°F] < 0.05 Nm Material shaft / housing stainless steel
2
Weight approx. 0.6 kg [21.16 oz] Shock resistance acc. to EN 60068-2-27 2500 m/s , 6 ms
2
Protection acc. to EN 60529 IP67 Vibration resistance acc. to EN 60068-2-6 100 m/s , 10 ... 2000 Hz
Electrical characteristics
Interface type Synchronous serial Synchronous serial Parallel Parallel
(SSI) (SSI)
Power supply (+V) 5 V DC (±5 %) 10 ... 30 V DC 5 V DC (±5 %) 10 ... 30 V DC Absolute encoders
Output driver RS485 RS485 Push-Pull Push-Pull singleturn
Power consumption typ. 89 mA 89 mA 109 mA 109 mA
(no load) max. 138 mA 138 mA 169 mA 169 mA
Permissible load / channel max. +/- 20 mA max. +/- 20 mA max. +/- 10 mA max. +/-10 mA
Update rate max. 15000/s max. 15000/s 40000/s 40000/s
SSI clock rate min./max. 100 kHz / 500 kHz 100 kHz / 500 kHz – –
Signal level HIGH typ. 3.8 V typ. 3.8 V min. 3.4 V min. V+ - 2.8 V
Signal level LOW (l Load = 20 mA) typ. 1.3 V typ. 1.3 V – –
(l Load = 10 mA) – – max. 1.5 V max. 1.8 V
(l Load = 1 mA) – – max. 0.3 V –
Rising edge time t r (without cable) max. 100 ns max. 100 ns max. 0.2 µs max. 1 µs
Falling edge time t f (without cable) max. 100 ns max. 100 ns max. 0.2 µs max. 1 µs
Short circuit proof outputs yes yes yes yes
3)
4)
Reverse polarity protection of the power supply no yes no yes
UL approval file 224618
CE compliant acc. to EMC guideline 2004/108/EC
RoHS guideline 2011/65/EU
Control inputs
Switching levels of the control inputs SET input
Power supply 5 V DC 10 ... 30 V DC This input is used to reset (zero) the encoder. A control pulse (HIGH) sent to this
Switching level LOW ) 1.7 V ) 4.5 V input allows the current position value to be saved as the new zero position in the
HIGH * 3.4 V * 8.7 V encoder.
Note : After applying power to the encoder and before activating the SET
input, a count direction (cw or ccw) must be clearly defined on the
Up/Down input to switch the counting direction
Up/Down input!
As a standard, absolute encoders deliver increasing code values when the shaft The response time is :
rotates clockwise (cw), when looking from the shaft side. When the shaft rotates
counter-clockwise (ccw), the output delivers accordingly decreasing code for 5 V DC power supply 0.4 ms
values. for 10 ... 30 V DC power supply 2 ms
As long as the Up/Down input receives the corresponding signal (HIGH), this
feature is reversed. Clockwise rotation will deliver decreasing code/current LATCH input
values while counter-clockwise rotation will deliver increasing code/current This input is used to “freeze” the current position value. The position value will
values. be statically available on the parallel output as long as this input remains active
The response time is : (HIGH).
for 5 V DC power supply 0.4 ms The response time is :
for 10 ... 30 V DC power supply 2 ms for 5 V DC power supply 140 µs
for 10 ... 30 V DC power supply 200 µs
1) For continuous operation max. 1500 min -1 .
2) 70°C [158°F] cable version.
3) If power supply +V correctly applied.
4) Only one channel allowed to be shorted-out:
at +V = 5 V DC short circuit to channel, 0 V, or +V is permitted.
at +V = 10 ... 30 V DC short circuit to channel or 0 V is permitted.
© Fritz Kübler GmbH, subject to errors and changes. 02/2015 www.kuebler.com 229