
Page 333 - Keubler Motion Sensors
P. 333
Absolute encoders – multiturn
Standard
mechanical multiturn, optical Sendix 5868 / 5888 (shaft / hollow shaft) CANopen/CANopenLift
www.HydroSanatSharif.com
Terminal assignment
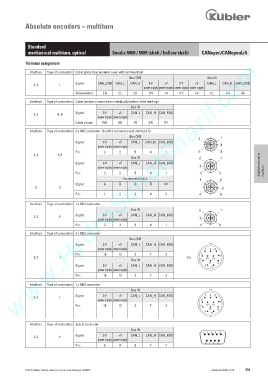
Interface Type of connection Cable gland (bus terminal cover with terminal box)
Bus OUT Bus IN
2, 5 1 Signal: CAN_GND CAN_L CAN_H 0 V +V 0 V +V CAN_L CAN_H CAN_GND
power supply power supply power supply power supply
Abbreviation: CG CL CH 0 V +V 0 V +V CL CH CG
Interface Type of connection Cable (isolate unused wires individually before initial start-up)
Bus IN
2, 5 A, B Signal: 0 V +V CAN_L CAN_H CAN_GND
power supply power supply
Cable colour: WH BN YE GN GY
Interface Type of connection 2 x M12 connector (3 x M12 connector with interface 5)
Bus OUT
2 1
Signal: 0 V +V CAN_L CAN_H) CAN_GND
power supply power supply 4
Pin: 3 2 5 4 1 5 3
2, 5 2, F
Bus IN 2 1
Signal: 0 V +V CAN_L CAN_H CAN_GND Absolute encoders
power supply power supply 3
multiturn
Pin: 3 2 5 4 1 4 5
Incremental track 1 2
Signal: A B 0 V
5 2 3
Pin: 1 2 3 4 5 4 5
Interface Type of connection 1 x M12 connector
Bus IN 2 1
2, 5 E Signal: 0 V +V CAN_L CAN_H CAN_GND
power supply power supply 3
Pin: 3 2 5 4 1 4 5
Interface Type of connection 2 x M23 connector
Bus OUT
Signal: 0 V +V CAN_L CAN_H CAN_GND
power supply power supply 1 9 8
Pin: 10 12 2 7 3 2
2, 5 J 2 x 7
Bus IN 3 10 12
11 6
Signal: 0 V +V CAN_L CAN_H CAN_GND 4 5
power supply power supply
Pin: 10 12 2 7 3
Interface Type of connection 1 x M23 connector
Bus IN
2, 5 I Signal: 0 V +V CAN_L CAN_H CAN_GND 1 9 8
power supply power supply 2
7
Pin: 10 12 2 7 3 3 10 12
11 6
4
5
Interface Type of connection Sub-D connector
Bus IN
1 2 3 4 5
2, 5 K Signal: 0 V +V CAN_L CAN_H CAN_GND
power supply power supply
6 7 8 9
Pin: 6 9 2 7 3
© Fritz Kübler GmbH, subject to errors and changes. 02/2015 www.kuebler.com 331